Self-Balancing Robot Workshop
Master control techniques from PID to Reinforcement Learning
Balance Bot e-Yan - The workshop robot
Workshop Summary
This hands-on workshop focuses on controlling a self-balancing robot using various control techniques. Participants will learn to interface with sensors, understand system dynamics, and implement control algorithms ranging from classical PID to optimal LQR and learning-based Reinforcement Learning methods.
Background
Self-balancing robots bring together ideas from control systems, electronics, and robotics. They are based on the inverted pendulum, a classic problem in control engineering where the main challenge is keeping an unstable system balanced.
These robots use an IMU (gyroscope and accelerometer) to measure their tilt and motion. A control algorithm then adjusts the motors to keep the robot upright by moving its wheels in the right direction.
Working with a self-balancing bot helps participants understand how sensors, control theory, and real hardware come together to maintain balance. The same principles are used in Segways, delivery robots, and humanoid robots, making this a great way to learn how stability control works in real-world systems.
FBD of Self Balancing Bot
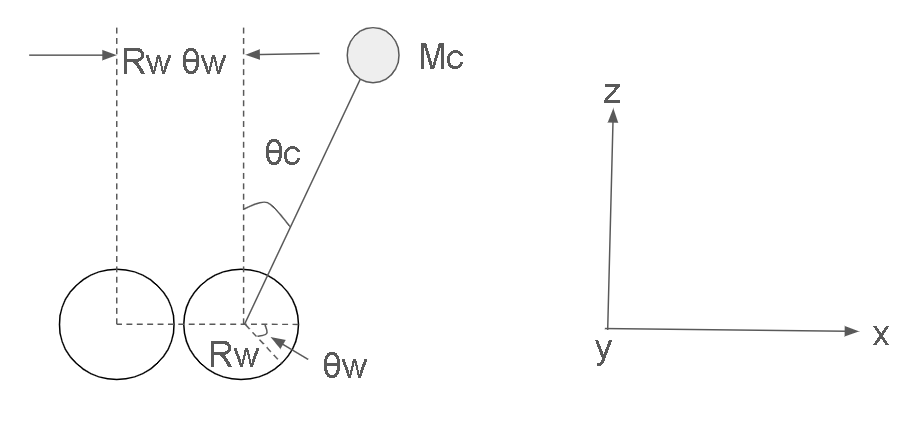
Key Variables: θc (tilt angle), θw (Wheel angle)
Rw (Radius of the wheel)
Workshop Timeline
Welcome and Introduction
Introduction to the workshop, objectives, and overview of what participants will learn about self-balancing robots and control systems.
Balance bot e-Yan: Hardware and Software
Overview of the hardware components and software architecture of the balance bot e-Yan.
PID Control Theory & Application
Learn about Proportional-Integral-Derivative control theory and its practical application in balancing robots.
LQR Control Theory & Application
Introduction to Linear-Quadratic Regulator control theory and its implementation for optimal control.
Reinforcement Learning
Explore reinforcement learning concepts and how they can be applied to control problems in robotics.
Recap & Applications
Summary of key concepts and discussion of real-world applications of control systems.
Total Workshop Duration
Complete hands-on learning experience
Installation Setup
Ubuntu 22.04 & 24.04
Windows 11
References
Self-Balancing Robot GitHub Repository
Complete source code and documentation
Workshop Tutorial PDF
Complete workshop tutorial document
Related Video Tutorial
Video demonstration of concepts
PID Controller - Wikipedia
Detailed explanation of PID control
Reinforcement Learning - Wikipedia
Introduction to reinforcement learning
LQR - Wikipedia
Linear-Quadratic Regulator explanation
Arduino Software
Official Arduino IDE and tools
Workshop Team

Associate Professor, Department of Computer Science & Engineering
Principal Investigator, e-Yantra. His research on intelligent and learning agents covers both theoretical topics (such as multi-armed bandits and MDPs) and applications (including railway scheduling, imperfect-information games, robot soccer, and finance).
He teaches an elective course on these topics at IIT Bombay, which attracts a registration of 200–300 in each offering.

Jaison Jose
Senior Project Technical Assistant,
e-Yantra
Currently pursuing a masters degree in the Department of Electrical Engineering, IIT Bombay. He has conducted 7 workshops on embedded systems and control systems in colleges across the country.
He is a theme leader in the e-Yantra Robotics Competition and specializes in PID control systems.

Arun P. Madhu
Senior Project Technical Assistant,
e-Yantra
Currently pursuing a masters degree in the Centre for Systems & Control, IIT Bombay. He has conducted 4 workshops on embedded systems in colleges across the country.
He leads the drone theme at e-Yantra and specializes in LQR control systems and optimal control.

Jerish Abijith Singh A. S.
Senior Project Technical Assistant,
e-Yantra
Currently pursuing a masters degree in the Department of Electrical Engineering, IIT Bombay. He has conducted 4 workshops on embedded systems and control systems in colleges across the country.
He leads the control systems theme at e-Yantra and specializes in hardware-software integration for robotics.

Srivenkateshwar Iyer
Project Technical Assistant, e-Yantra
He has conducted 4 workshops on embedded systems in colleges across the country.
He leads the multi-robot theme at e-Yantra and specializes in control systems and drone technologies.

Barish Moitra
Project Technical Assistant, e-Yantra
He is working on control system theme at e-Yantra and contributes to various robotics projects and workshop implementations.